This work compares 10 of open-source healthcare projects in terms of how easy it is to obtain the required components and build the device. Each one of the following blog entries will analyze one of them.
We selected 10 open-source hardware medical devices and compared them in terms of how easy it is to obtain the components and build the device independently. A systematic review is not possible at this stage, as many of the projects are still in early phases and are not yet reported in peer-reviewed literature. As this is a rapidly developing area, then, we do not claim our list of projects is exhaustive or fully representative. We defined the scope of the review based on the following inclusion criteria: (1) availability of source files, and (2) can potentially be used as an active medical device, that is, it relies on software and a source of electrical energy for functioning.
All the design files, for example, two-dimensional drawings, CAD (computer-aided design) files, circuit schematics and layouts, need to be available and modifiable. If the files are only available in a non-editable format, the project was excluded. For example, the Robohand [i] three-dimensional (3D)-printed prosthetics project does not share source files, only STL (STereoLithography) files, and then only in a non-editable format.
We distinguish between:
▸ Passive medical devices, like hose clamps
▸ Medical devices relying on software, like most syringe
drivers
▸ Devices for laboratory research, like centrifuges
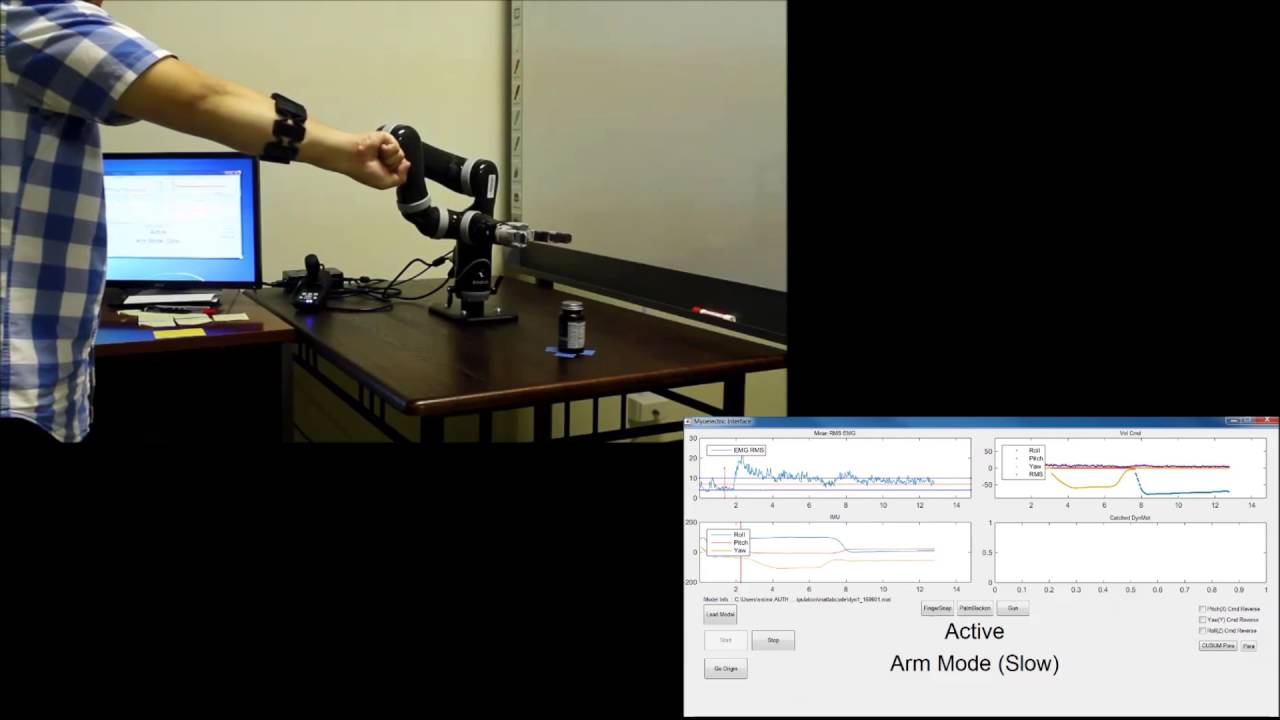
In this first entry of the comparison we start by Myolectric prostheses. Myoelectric prostheses are controlled by tiny voltages generated on the surface of the skin by the activity of residual muscles, called surface electromyography (EMG). These voltages are amplified and processed so that when the user flexes a muscle, motors on the prosthesis move in a predictable way. A myoelectric prosthesis does away with the harness and cables of a body-powered device and can be made to look very natural, although at the cost of a more restrictive and less comfortable socket. Another downside to these devices is their lack of responsiveness: most prosthetic hands move slowly to increase grip force or battery life at the expense of fast action. However, the major barrier to adoption is cost: an arm costs at least $30 000.
MyOpen
MyOpen, [ii] part of the Open Prosthetics Project, [iii] creates open-source hardware for myoelectric control. A circuit board design for a digital signal processing unit and related software are available. [iv] The hope is that it can eventually be used to control mechatronic prostheses for amputees. [v] MyOpen wants to bring the cost of a prosthetic arm as low as $250.
Silva et al [vi] have made and tested a self-contained mechanomyogram controlled prosthesis. Their device contains three sensors, each consisting of a microphone to pick up muscle sounds and an accelerometer to detect external interference. Their signals are interpreted by a microcontroller and converted into simulated EMG signals to control an Otto Bock hand. [vii] Their results show that the devices perform with over 70% control accuracy.
In an attempt to replicate the research conducted by Silva et al, the Open Prosthetics project built a data collection system for recording MMG signals. It consists of a 3.5 mm audio plug, a microphone cartridge, some wire and a laptop. Not including the laptop, the components costless than $5. The microphone is an electret condenser type, and is powered by the laptop’s sound card. They have used the free and open-source software (FOSS) Audacity to record and process the sound. They have taped the microphone directly onto the skin with masking tape, plugged it into the laptop, and recorded the audio. No special skills or tools are required to build this system.
e-Nable
Another effort to develop a myoelectric prosthetic is the Limbitless Arm, [viii] created by a team at University of Central Florida. This prosthetic is also part of e-Nable, [ix] an online community that connects amputees with people who have 3D printers. It was estimated to cost approximately $350 in materials to produce a Limbitless Arm.
To produce a 3D printed mechanical hand, 3DUniverse [x] is selling a ‘Hand Materials Kit’ for $25. This kit is for assembling the printed hand only and is also developed by the e-Nable community. The models are available to download freely and print. However, the users still need to access a 3D printer to print the parts. Note that inexpensive 3D printers are available in developing world contexts with some open-source printers even designed to be mobile. [xi]
[i] Van As R. Robohand. http://www.robohand.net/. http://www.webcitation.org/6SyWJdfOA
[ii] Hanson T, Kuniholm J. Leveraging larger markets to encourage innovation in prosthetics: Design of MyOpen, an open myoelectric signal processor for use as an input device for video gaming and hobby robotics. Proceedings of the MEC’08 Conference, 2008.http://hdl.handle.net/10161/2781 (accessed Aug 2015).
[iii] The Shared Design Alliance. The Open Prosthetics Project.http://openprosthetics.org/. http://www.webcitation.org/6YgclH8Wt
[iv] The Open Prosthetics Project. MyOpen GitHub repository. https://github.com/tlh24/myopen. http://www.webcitation.org/6Ygc3gli2
[v] Clark L. Open Prosthetics Founder: Challenges Ahead for Open Source Medical Devices. http://www.linux.com/news/featured-blogs/200-libby-clark/783283-open-prosthetics-founder-challenges-ahead-for-open-source-medical-devices.http://www.webcitation.org/6ZBClaK2Q
[vi] Silva J, Heim W, Chau T. A self-contained mechanomyography-driven externally powered prosthesis. Arch Phys Med Rehabil 2005;86:2066–70.
[vii] Ottobock. System hands. http://corporate.ottobock.co.uk/cps/rde/xchg/ob_com_en/hs.xsl/3733.html.http://www.webcitation.org/6aQfwanaa
[viii] Enabling The Future. The Limbitless Arm. 2014. http://enablingthefuture.org/upper-limb-prosthetics/the-limbitless-arm/. http://www.webcitation.org/6ZBCvLVqx
[ix] The e-NABLE Project. Enabling the future. http://enablingthefuture.org/. http://www.webcitation.org/6YgczpEE8
[x] 3D Universe. Raptor Hand by e-NABLE—Assembly Materials Kit. http://shop3duniverse.com/collections/3d-printable-kits/products/raptor-hand-by-e-nable-assembly-materials-kit. http://www.webcitation.org/6aVQkUSX1
[xi] King DL, Babasola A, Rozario J, et al. Mobile open-source solar-powered 3-D printers for distributed manufacturing in off-grid communities. Challenges in Sustainability 2014;2:18–27.