Hoy 4 de Octubre se ha defendido el Trabajo Fin de Máster titulado «Concepts and Methodologies for Zone-based Automotive Electric/Electronic Arquitectures«, dirigido por el Prof. Sergio Martín, y enmarcado en el Electronics for Information and Communication Technologies Master de la UNED. Aquí os dejamos su resumen:
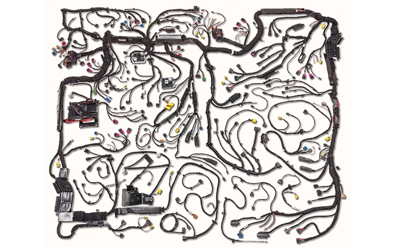
La complejidad de las arquitecturas Eléctricas/Electrónicas en el sector de la automoción, ha aumentado drásticamente en los últimos 20 años. Comenzando con menos de 10 ECUs por sus siglas en inglés o unidades de control electrónico, por ejemplo, para la gestión del motor o el control electrónico de estabilidad, la demanda en constante aumento de sistemas de seguridad, confort e información y entretenimiento ha llevado a las arquitecturas E/E actuales con más de 150 ECU. La cantidad de componentes, ECU, sensores, actuadores tiene un impacto directo en la complejidad del arnés de cableado, ya que están altamente interconectados con diferentes tecnologías de comunicación, LIN, CAN, Ethernet … Además, todos los periféricos, es decir, sensores y actuadores, de una ECU determinada normalmente están conectados directamente a ese nodo. El arnés de cableado resultante es muy complejo, tiene una estructura monolítica y puede tener un peso de hasta 60 kg para vehículos de lujo. Por lo tanto, no se puede fabricar automáticamente, sino que se debe construir a mano. Sin embargo, para otras arquitecturas de vehículos, un proceso de trabajo manual ya no será factible debido al aumento de los costos de mano de obra y la seguridad del proceso.

Una solución a este problema sería pasar de un enfoque funcional a un enfoque geométrico. Los componentes correspondientes a un nodo ya no se conectarían directamente a su nodo de control, sino que se conectarían a un “hub”. A continuación, sus datos se canalizarían a través de este “hub” hasta el nodo de control correspondiente.
Este enfoque, se conoce como “zonalización” o arquitectura eléctrica / electrónica zonal.
Este TFM analiza y describe diferentes metodologías y enfoques para migrar arquitecturas de comunicaciones e interconexión actuales en automoción a una arquitectura zonal. Comenzando con una división geométrica física del mazo de cables dentro del vehículo y pasando a una división lógica y funcional del sistema.
La división física reduce directamente la complejidad del cableado, permitiendo así la automatización de su producción. Por otro lado, una división lógica y funcional requiere un estudio adicional que incluye la adición de un controlador para cada zona que servirá como centro de conexión o proxy de la zona geométrica. El controlador de zona es clave para la “zonalización”., sin embargo, tiene un impacto negativo en la latencia de los sistemas. Este controlador sirve como puerta de enlace entre los buses heredados (CAN, LIN, FlexRay…) y la comunicación basada en Ethernet añadiendo cierto tiempo a la comunicación entre el componente y su nodo central. Por esta razón, se organizará una clasificación de los diferentes mensajes basados en señales antes de que se canalicen en una comunicación basada en IP. Esos son: el mejor esfuerzo, basado en eventos, bucle de control de ciclo de baja latencia, mensajes de audio / video y de tiempo crítico.
About the author